Bio-inspired synchronizing control for floating wind turbines
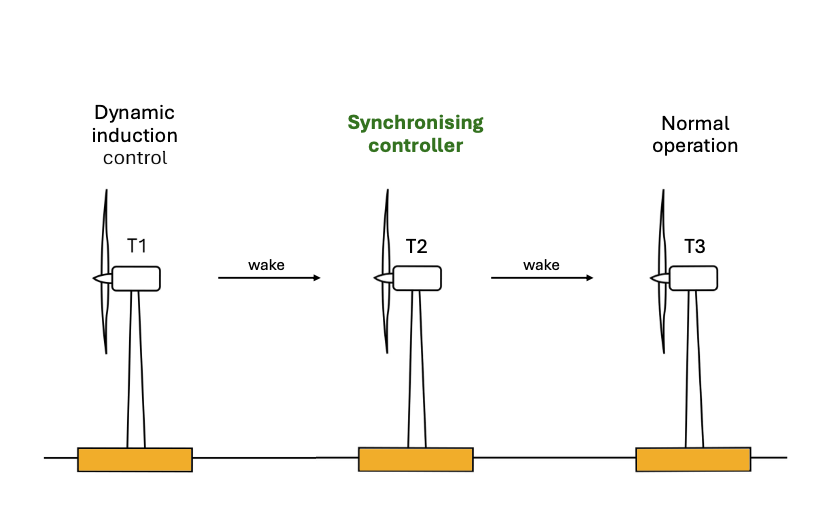
The aim of this PhD is to develop bio-inspired control strategies for performance and load optimisation of floating wind turbines. Wake effects have been long recognised to reduce the power production of wind farms and increase the structural loading on downstream turbines. The wake recovery can be accelerated using active wake mixing strategies, which attempt to shorten the wake behind the first row of turbines in a wind farm and, as a result, increase energy production in the following row of turbines. Dynamic induction control strategies show promising results, but it has been left unexplored if the second row of turbines and successive rows should also deploy dynamic induction control and if it should be synchronised with the incoming dynamic flow profiles.
The purpose is to develop bio-inspired control at turbine and farm level to mitigate undesired wake effects on power production and loads. The control algorithms will focus on dynamic induction control, where upstream turbines will add low-frequency perturbations on the blade pitch angles. To leverage the large amount of data generated by wind turbine sensors and to manage the complexity of floating wind turbine systems and flow dynamics, data-driven control methods will be considered. The controller will be inspired by the fluid-mediated interactions of flocks of birds and schools of fish, which may take advantage of the surrounding flow during locomotion. In a similar manner, the downstream turbines will be synchronised with the incoming flow to maximise energy yield while minimising loads. The performance of these bio-inspired algorithms will be optimised for real-time operation and adapted for realistic time-varying inflows.
The potential of the developed controller algorithms will be tested using the hybrid wind tunnels developed by HybridLabs. Physical scaled models of IEA 15MW reference wind turbines subjected to dynamic floating motions will be employed. To emulate the hydrodynamic effects, the scaled models will be mounted on hexapods controlled by numerical models.
Ideal outcome: Synchronizing data-driven floating turbine controller operating in real time and validated experimentally. This work belongs mainly to WP3. However, we will also contribute to WP1 regarding the experimental setup on which the controller developed in WP3 will be tested.